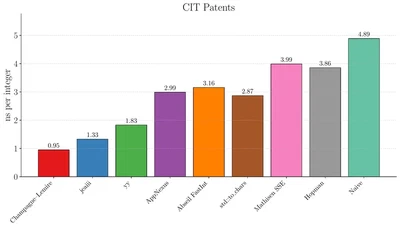
Conversion de nombres en chaînes décimales
Ce projet étudie des algorithmes rapides et exacts pour convertir des nombres binaires, flottants ou entiers, vers leurs représentations décimales textuelles.

Chercheur postdoctoral en informatique
Ce projet étudie des algorithmes rapides et exacts pour convertir des nombres binaires, flottants ou entiers, vers leurs représentations décimales textuelles.
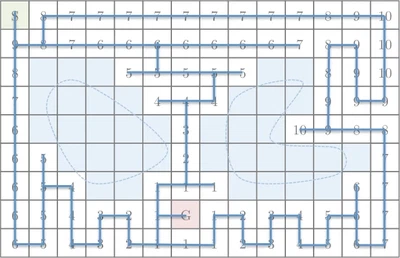
Ce projet visait à développer des planificateurs optimaux de chemins-couvrants. Dans le futur, il est également prévu de développer un planificateur considérant des contraintes …
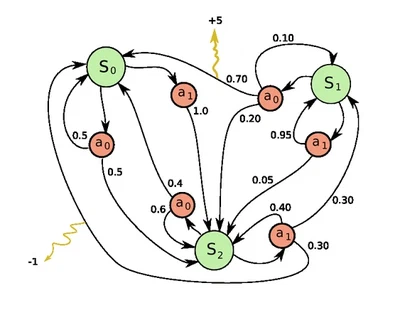
Ce projet vise à trouver différentes façons d'améliorer la performance des planificateurs de (SSP-)MDP en considérant l'architecture des ordinateurs (p.ex., la mémoire cache, le …

Ce projet visait à créer un planification pour VÉs qui considère à la fois le temps de déplacement, le temps de recharge, et le temps d'attente aux bornes.